CIAT
SOFTWARE
INICIO
BLOG
¿Qué es el control PID?
Miércoles, 26 de Octubre del 2022
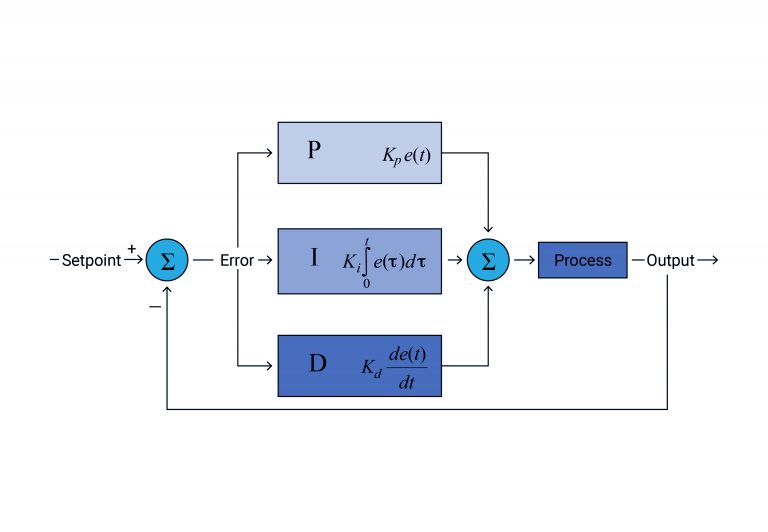
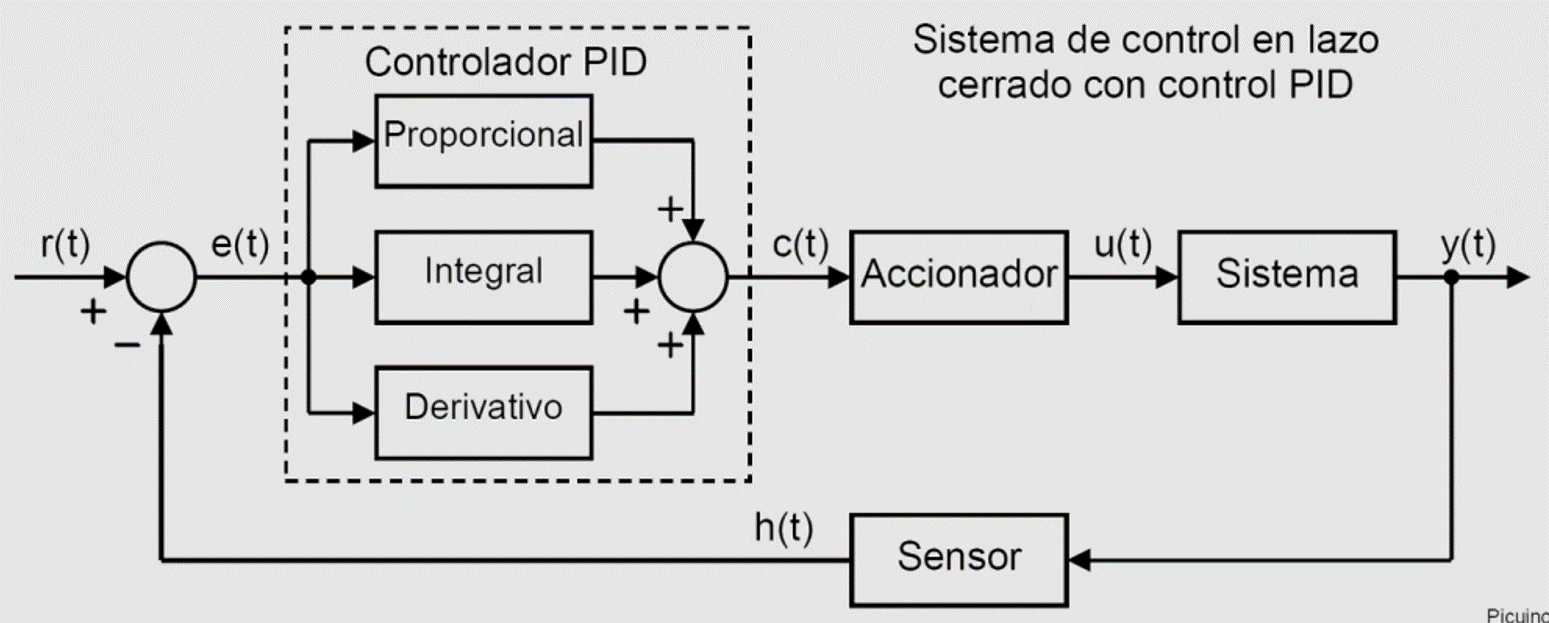
¿Qué es el control PID? Como todos sabemos, hoy en día la automatización se ha convertido en un elemento clave para el crecimiento de las industrias pues, entre otros aspectos, es una solución eficiente para mantenerse a la par de la competencia, cubrir el aumento de la demanda en el mercado y, todo ello, en el menor tiempo. Por lo que lograr la autonomía de los procesos resulta ser un objetivo que toda industria desea alcanzar. Un controlador PID (Proporcional Integrativo Derivativo) es del tipo continuo y se encarga de modular la señal de control de un sistema en función del error que existe entre el valor medido y el valor deseado. Este tipo de control es ampliamente utilizado en los procesos industriales, incluso cuando se presentan interferencias externas. Asimismo, resulta fácil de implementar y puede ser utilizado en todo tipo de hardware de manera eficiente debido a que no utiliza muchos recursos. Por otro lado, lo crítico radica en la sintonización, la cuál debe de realizarse por un experto en proceso y durante alguna prueba en piso. Una vez sintonizado el controlador, no requiere de ajustes adicionales. ¿Qué significan sus siglas? El controlador basa su funcionamiento de la acción de control con los siguientes tres parámetros: -Proporcional (P-Kp). La acción de control Proporcional (o también llamado ganancia proporcional) produce una salida del controlador en función al error que presenta el sistema. Un control basado únicamente en la acción proporcional puede controlar cualquier planta estable, pero posee un desempeño muy limitado y error considerable en régimen permanente (offset). -Integral (I-Ti). En cuanto al parámetro Integral o control flotante, este otorga una salida del controlador que es proporcional al error acumulado, lo que se traduce en un intervalo de respuesta. Asimismo, la acción P, se encarga de notificar a la salida cuanto desplazarse cuando un error aparece, mientras que el control Integral, le dice a la salida que tan rápido moverse cuando el error aparece. -Derivativo (D-Td). La acción derivativa, funge como un parámetro preventivo, debido que predice el error y emplea una acción oportuna para corregirlo. Dicha acción, reacciona a la rapidez de entrada y altera la señal de salida, por lo cual actúa ante la velocidad del cambio del error y lo corrige antes de que el error incremente. Aplicaciones del control PID El control PID se aplica a sistemas que requieran de una alta precisión, como aplicaciones de temperatura o presión, en donde la salida final del sistema debe ser lo más cercana a la salida deseada. Además, con estos controladores se logra ajustar parámetros como la velocidad de respuesta y el sobrepaso, vitales en sistemas de posicionamiento. Un controlador PID puede aplicarse a cualquier sistema o aplicación. Se usa comúnmente para controlar la posición de algún elemento mecánico, como puede ser un servomotor. Sin embargo, su uso se puede extender a controles de temperatura, velocidad, potencia, entre otros. ¿Cuáles son los métodos más empleados para sintonizar el controlador PID? En la actualidad se emplean varias metodologías para la sintonización de las constantes del controlador, las más sobresalientes son: 1. Método Ziegler-Nichols en lazo cerrado (oscilaciones sostenidas). Consiste en obtener la respuesta medida a una perturbación, únicamente con acción proporcional. Por lo que se requiere el incremento del valor de la constante hasta que la respuesta del sistema sea armónica, y a este valor se le conoce como “Ganancia Última” KPU, así como el periodo de la señal “Periodo Último” TU. 2. Método Tyreus-Luyben en lazo cerrado. Al igual que en el método anterior, se enfoca en la evaluación de los parámetros a partir de la “Ganancia Última” y el “Periodo Último”. Propone ajustes más relajados que el anterior y se aplica fundamentalmente a plantas que poseen un integrador. 3. Método de Ziegler-Nichols en lazo abierto (Curva de respuesta). Se inicia introduciendo un escalón en la señal de control y se registra el transitorio de la variable medida. Aplicando el método del punto de inflexión, lo cual permite simplificar como un sistema de primer orden más un tiempo muerto. 4. Método Cohen y Coon. Se emplea la misma prueba que en el método anterior, y propone la relación R=L/τ.
Etiquetas
PLC
HMI
Curso
Analógico
Tecnólogia
Preparación
Automatización
Control Discreto
Control Analógico
NOM-001-SEDE-2012
Interfaces Hombre Maquina
Recientes
17 Feb 2023
09 Ene 2023
09 Ene 2023
19 Dic 2022
19 Dic 2022
30 Nov 2022
Etiquetas
PLC
HMI
Curso
Analógico
Tecnólogia
Preparación
Automatización
Control Discreto
Control Analógico
NOM-001-SEDE-2012
Interfaces Hombre Maquina